Regularization and Optimization
参考:Stanford CS231n 10th Anniversary, Lecture 3, April 8, 2025
回顾:损失函数¶
在上一讲中,我们建立了线性分类器的基本框架:
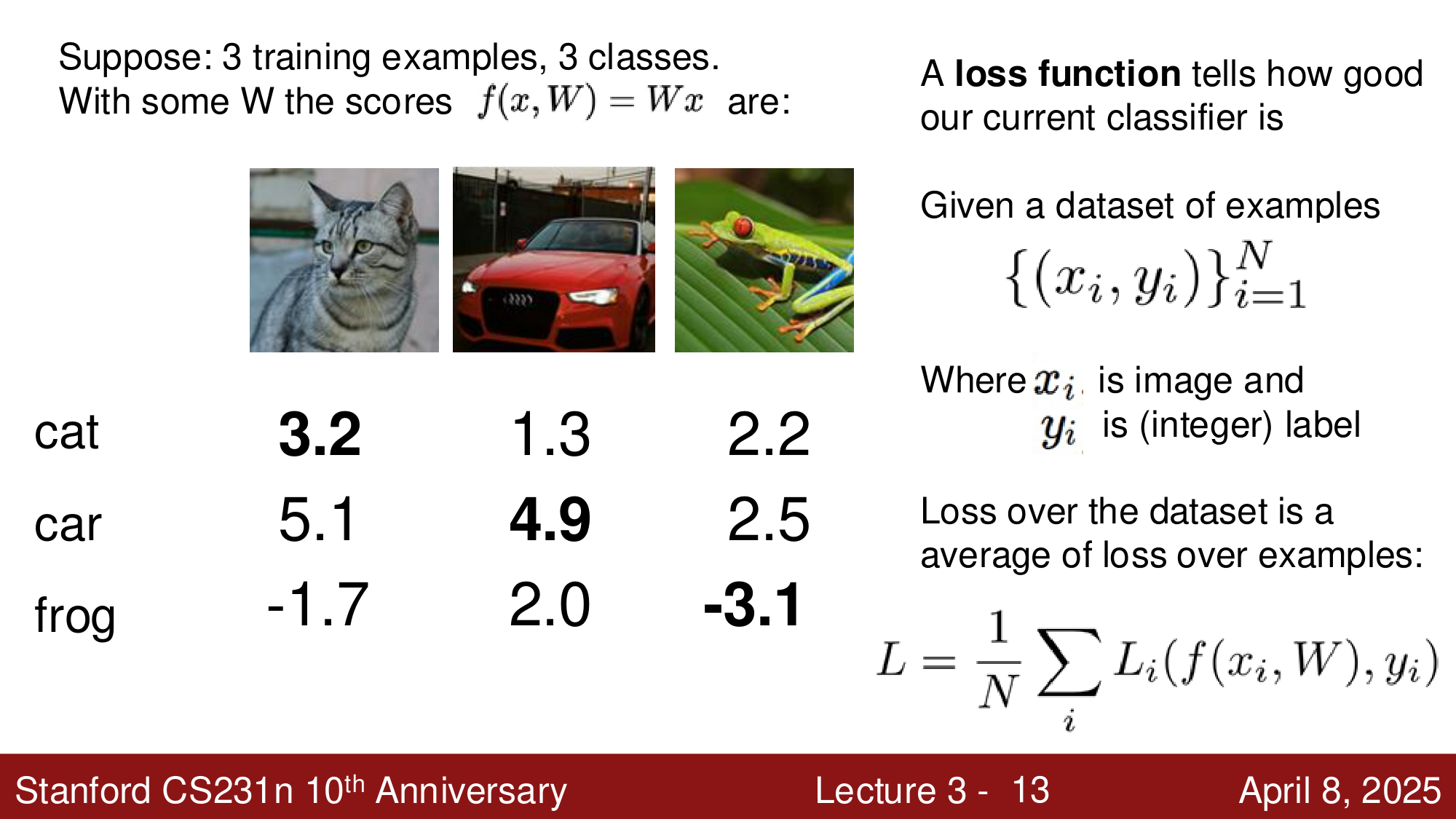
- 得分函数 (Score Function):\(s = f(x; W) = Wx\)
- 损失函数 (Loss Function):衡量预测与真实标签之间的差距
给定数据集 \(\{(x_i, y_i)\}_{i=1}^N\),总损失为各样本损失的平均:
正则化 (Regularization)¶
为什么需要正则化?¶
仅靠数据损失来训练模型存在一个根本问题:模型可能会 过拟合 (overfit) 训练数据——在训练集上表现完美,但在新数据上表现很差。
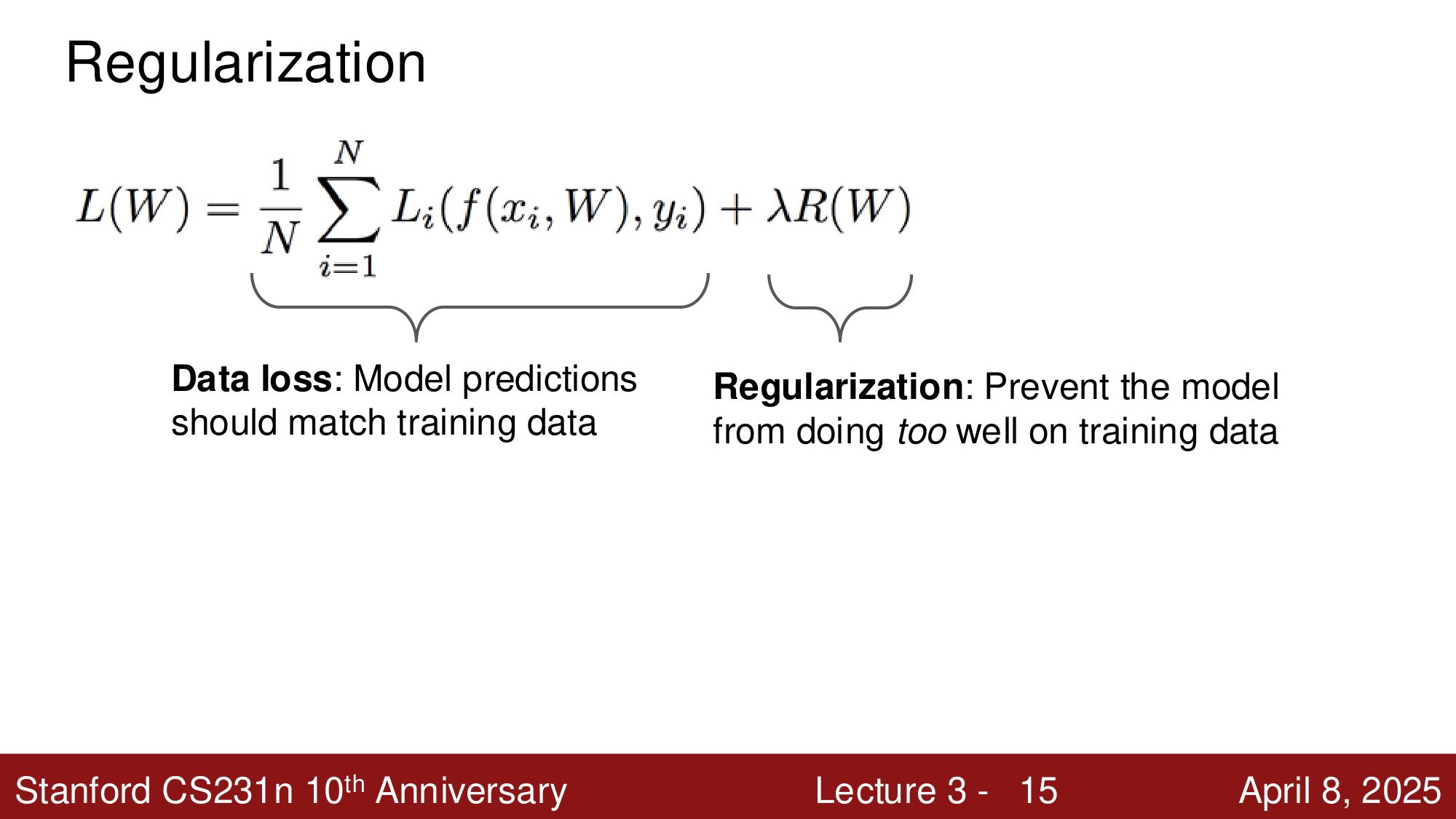
正则化的完整损失函数:
- 第一项是 数据损失 (Data Loss):模型预测应当匹配训练数据
- 第二项是 正则化损失 (Regularization Loss):阻止模型在训练数据上拟合得 太好
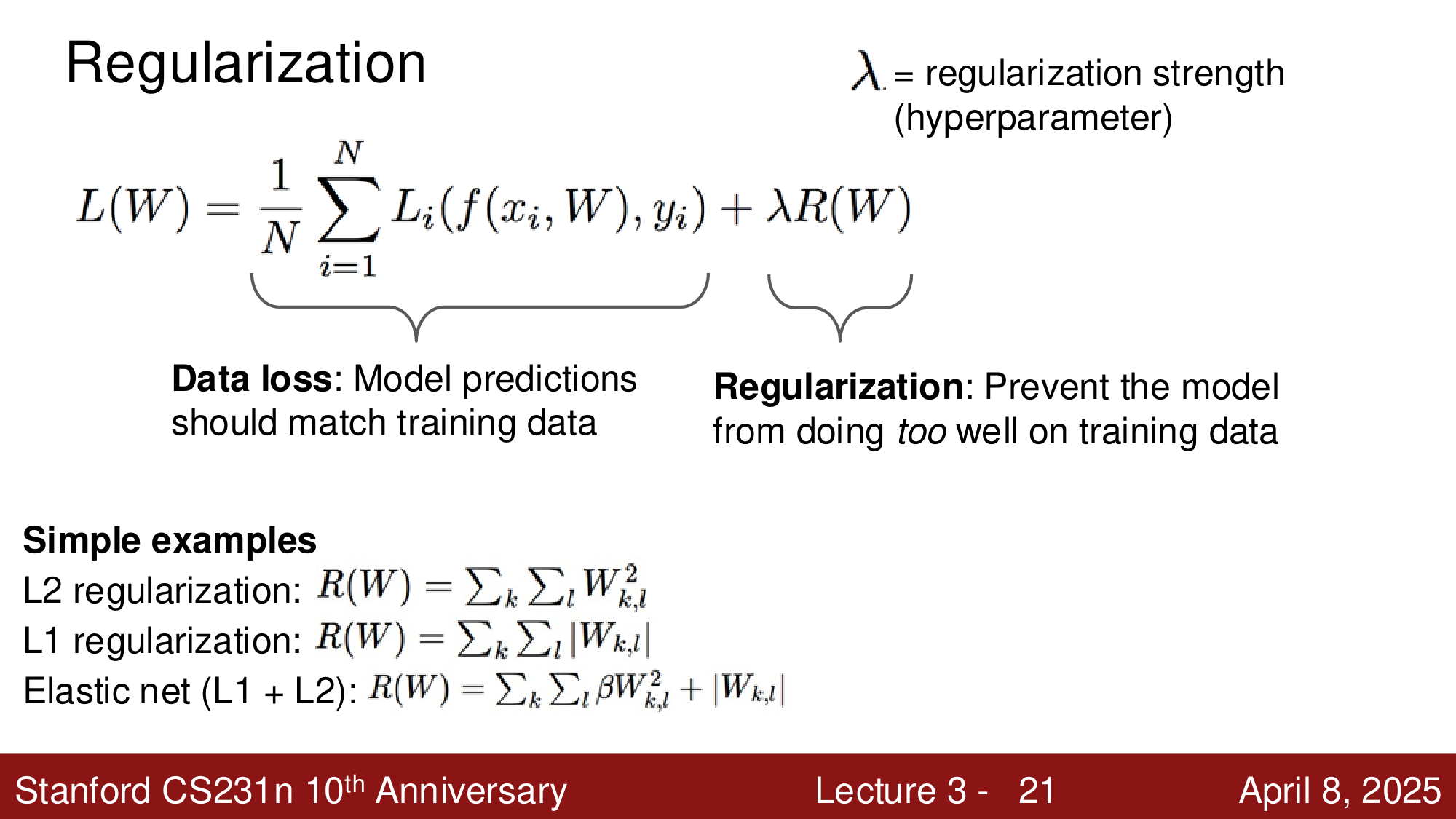
\(\lambda\) 是 正则化强度(超参数),控制两项之间的权衡。
正则化的直觉¶
考虑一个简单的回归问题。给定训练数据点,有两种拟合方式:
- \(f_1\):一条复杂的高次曲线,完美穿过每一个训练点
- \(f_2\):一条简单的直线,大致拟合趋势但不完美
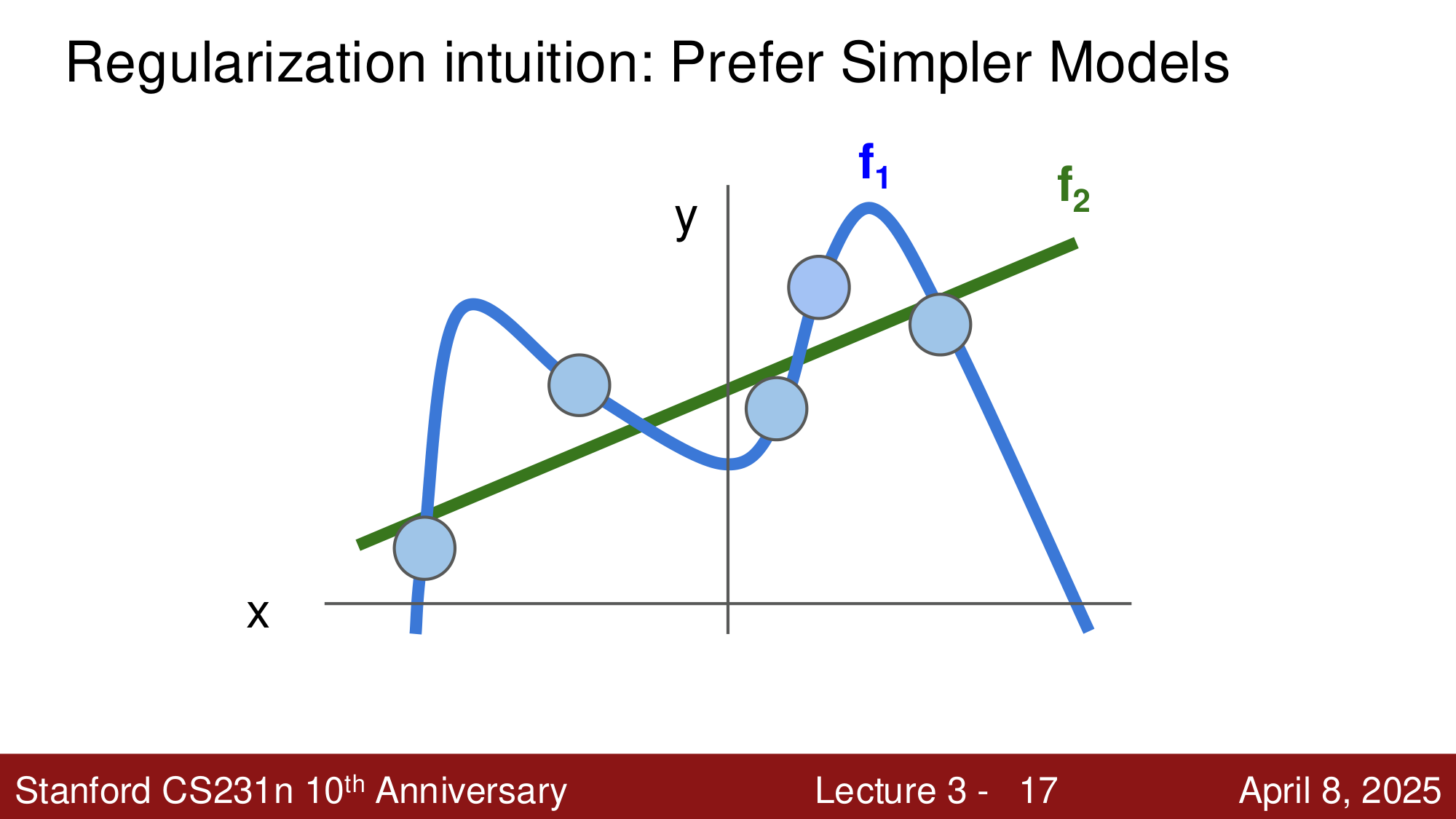
当出现新的测试数据时,\(f_2\)(简单模型)通常表现更好,因为它没有拟合训练数据中的噪声。这就是 奥卡姆剃刀 (Occam's Razor) 的思想:在多个能解释数据的假说中,最简单的那个往往是最好的。
常见的正则化方法¶
简单形式:
- L2 正则化:\(R(W) = \sum_k \sum_l W_{k,l}^2\)
- L1 正则化:\(R(W) = \sum_k \sum_l |W_{k,l}|\)
- Elastic Net (L1 + L2):\(R(W) = \sum_k \sum_l \beta W_{k,l}^2 + |W_{k,l}|\)
更复杂的形式:Dropout、Batch Normalization、Stochastic Depth 等(后续课程讨论)。
为什么正则化有效?¶
- 表达对权重的偏好:引导模型选择特定形式的权重
- 使模型更简单:提高泛化能力
- 改善优化:为损失函数增加曲率
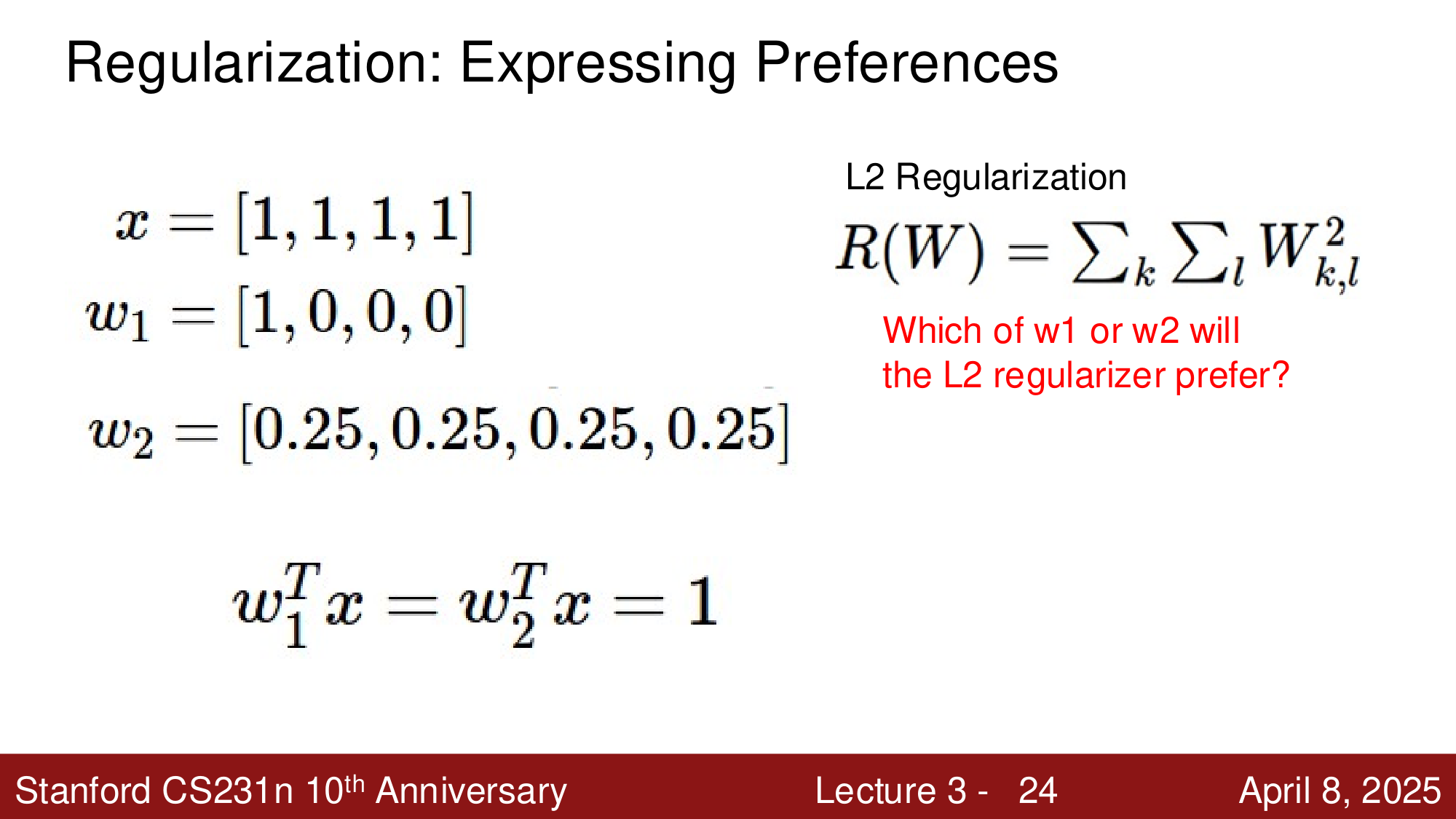
L2 正则化的偏好¶
考虑输入 \(x = [1, 1, 1, 1]\),两组权重:
- \(w_1 = [1, 0, 0, 0]\)
- \(w_2 = [0.25, 0.25, 0.25, 0.25]\)
两者的预测结果相同:\(w_1^T x = w_2^T x = 1\)
但 L2 正则化值不同:
- \(R(w_1) = 1^2 + 0 + 0 + 0 = 1\)
- \(R(w_2) = 4 \times 0.25^2 = 0.25\)
L2 正则化偏好 \(w_2\),因为它将权重 分散 到所有维度上,让模型更多地依赖所有输入特征,而非仅依赖某一个特征。
相反,L1 正则化偏好 \(w_1\)(稀疏权重),因为 \(|w_1|_1 = 1 < |w_2|_1 = 1\)... 实际上这个例子中 L1 范数相同,但通常 L1 会推动权重变为稀疏(许多值为 0)。
回顾:完整框架¶
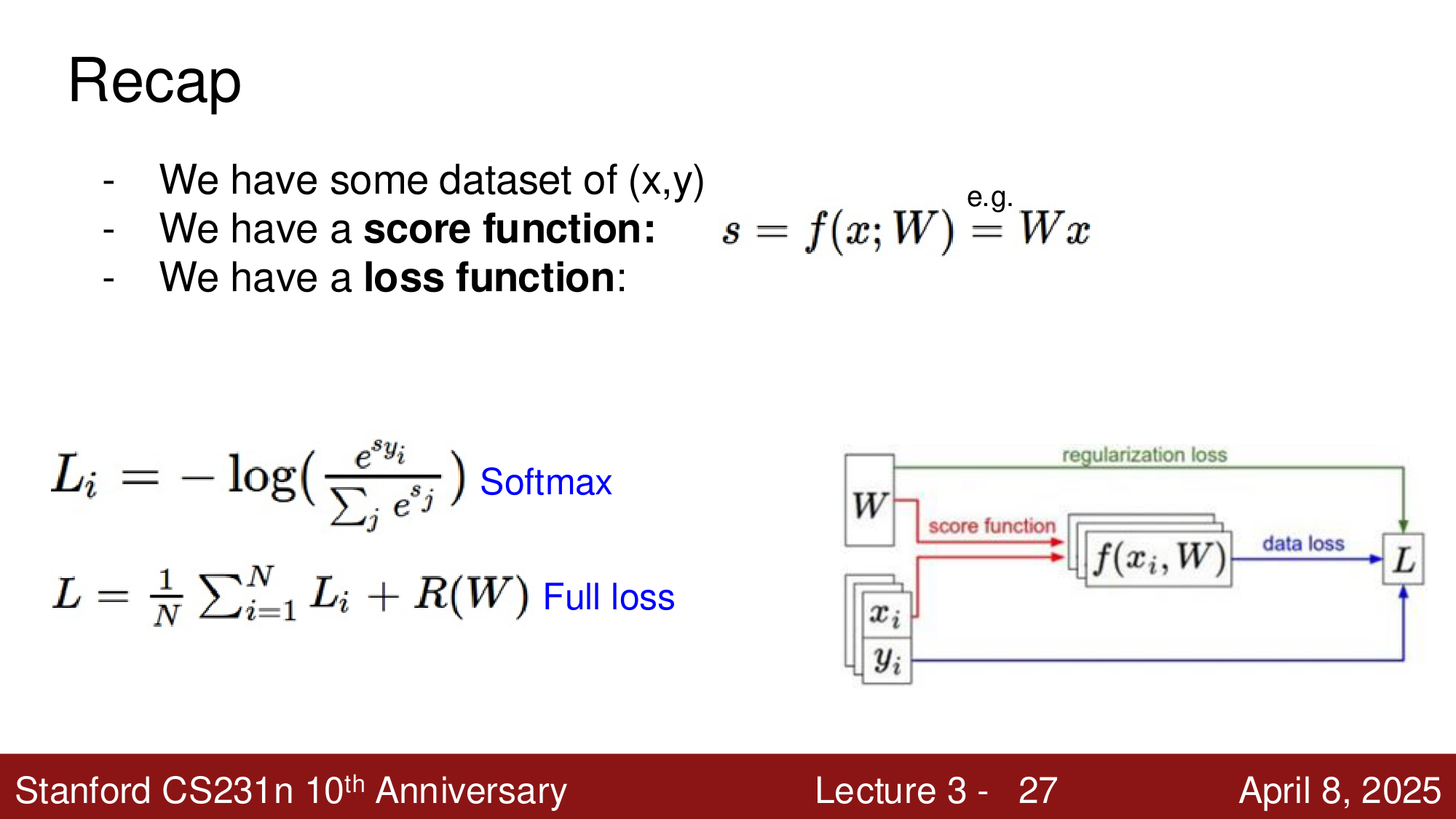
到目前为止我们有:
- 数据集:\((x, y)\) 对
- 得分函数:\(s = f(x; W) = Wx\)
- 损失函数:如 Softmax(交叉熵)\(L_i = -\log\left(\frac{e^{s_{y_i}}}{\sum_j e^{s_j}}\right)\)
- 完整损失:\(L = \frac{1}{N}\sum_{i=1}^N L_i + R(W)\)
核心问题:如何找到最优的 \(W\)?这就是 优化 (Optimization) 的任务。
优化 (Optimization)¶
策略 #1:随机搜索(非常差的方法)¶
随机生成大量权重矩阵 \(W\),评估损失,保留最好的一个。
在 CIFAR-10 上只能达到约 15.5% 的准确率(随机猜测是 10%,SOTA 约 99.7%)。这显然不是一个好方法。
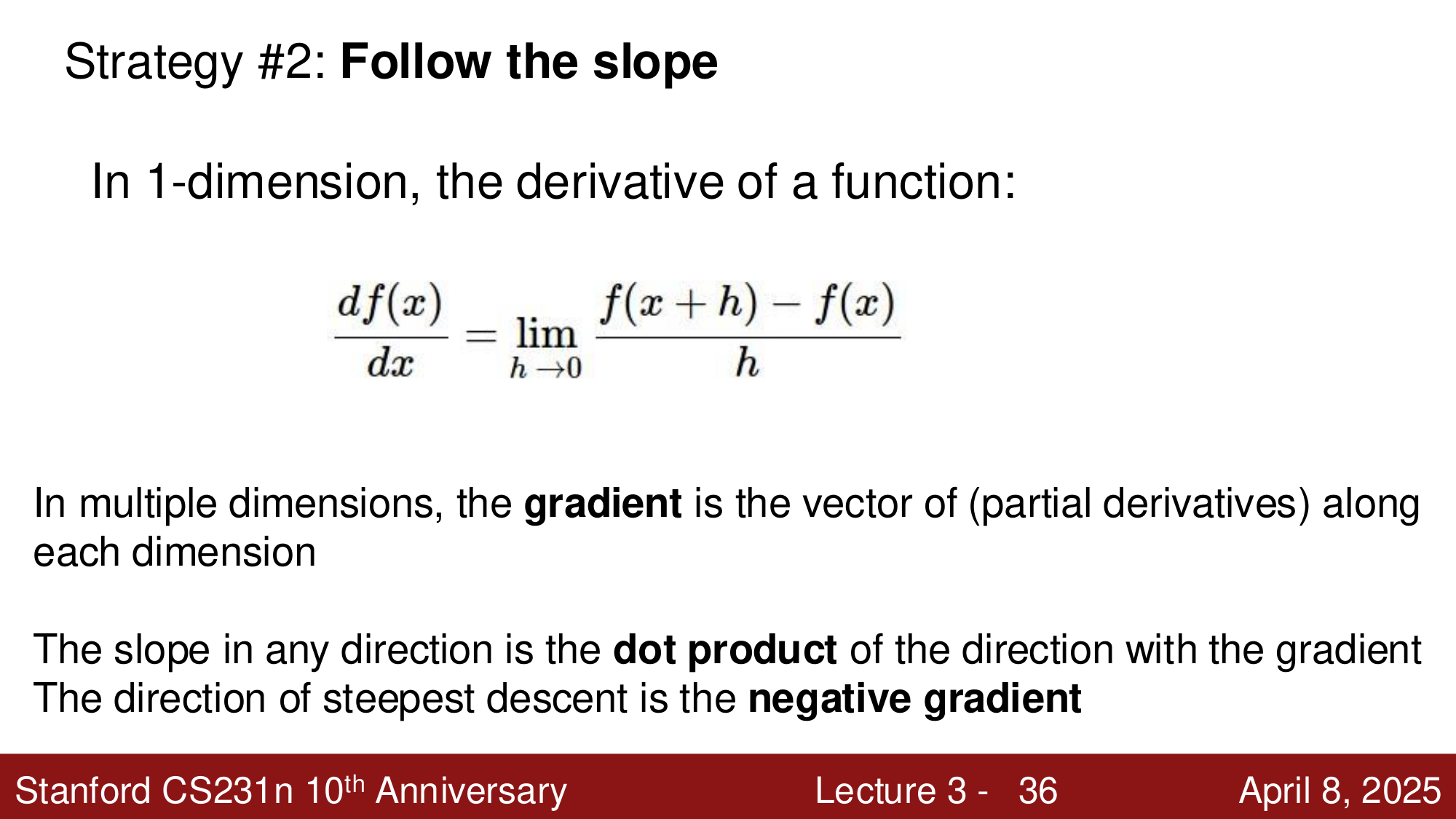
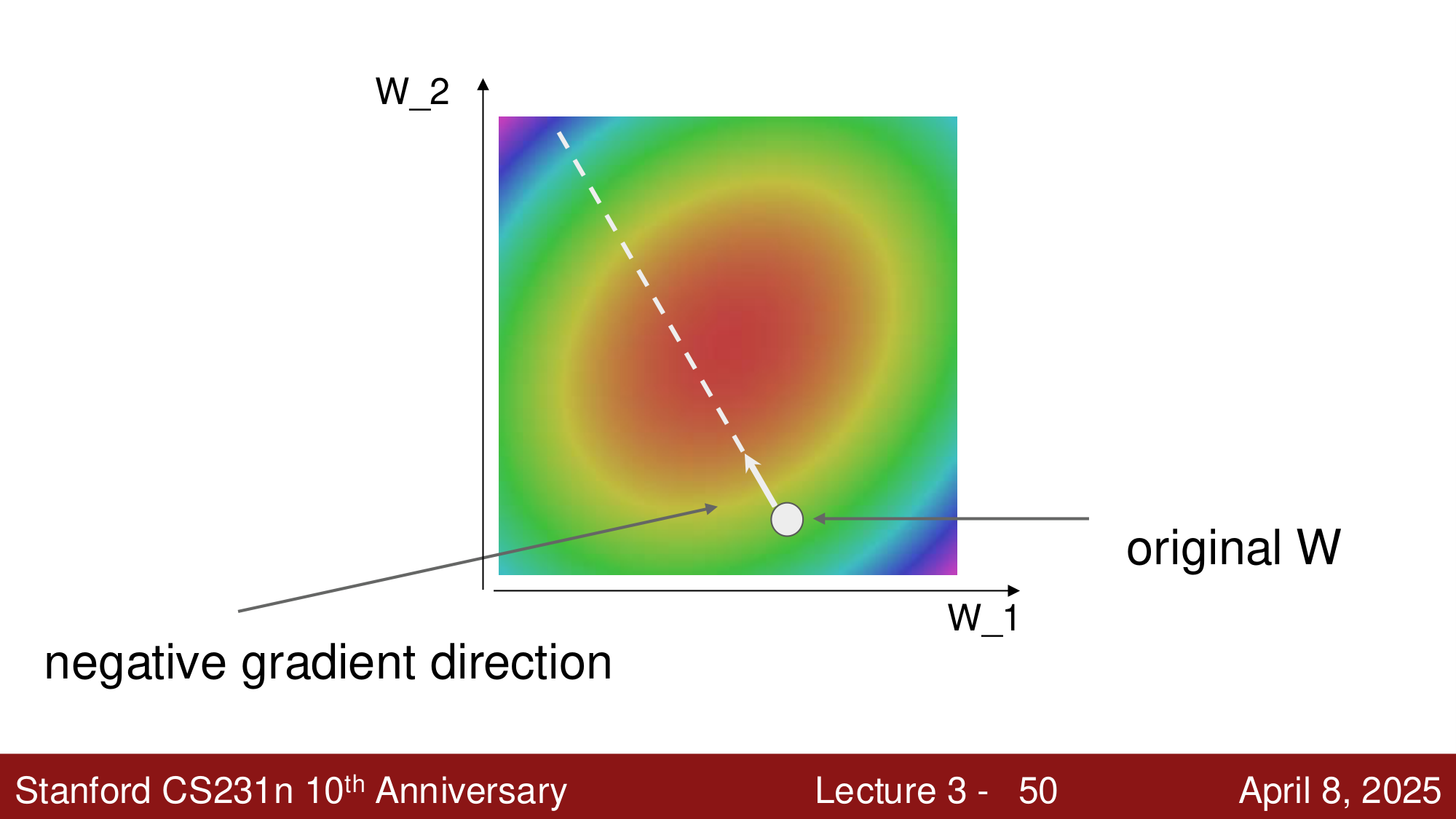
策略 #2:沿着斜坡走下去¶
想象站在山上,想走到最低的山谷——应该沿着 最陡 的方向走下去。在数学中,这就是 梯度下降 (Gradient Descent)。
梯度 (Gradient)¶
在一维中,函数的导数定义为:
在多维中,梯度 (Gradient) 是偏导数组成的向量:
- 任意方向的斜率 = 该方向与梯度的 点积
- 最速下降方向 就是 负梯度方向
数值梯度 vs 解析梯度¶
数值梯度 (Numerical Gradient):
对每个维度,逐一微扰 \(W\) 的某个分量,计算损失变化:
- 优点:容易实现
- 缺点:非常慢(需要对每个参数都做一次前向传播),且只是近似值
解析梯度 (Analytic Gradient):
利用微积分直接推导出梯度的封闭形式表达式。
- 优点:精确、快速
- 缺点:容易写错
实践中:始终使用解析梯度,但用数值梯度来验证实现的正确性。这称为 梯度检查 (Gradient Check)。
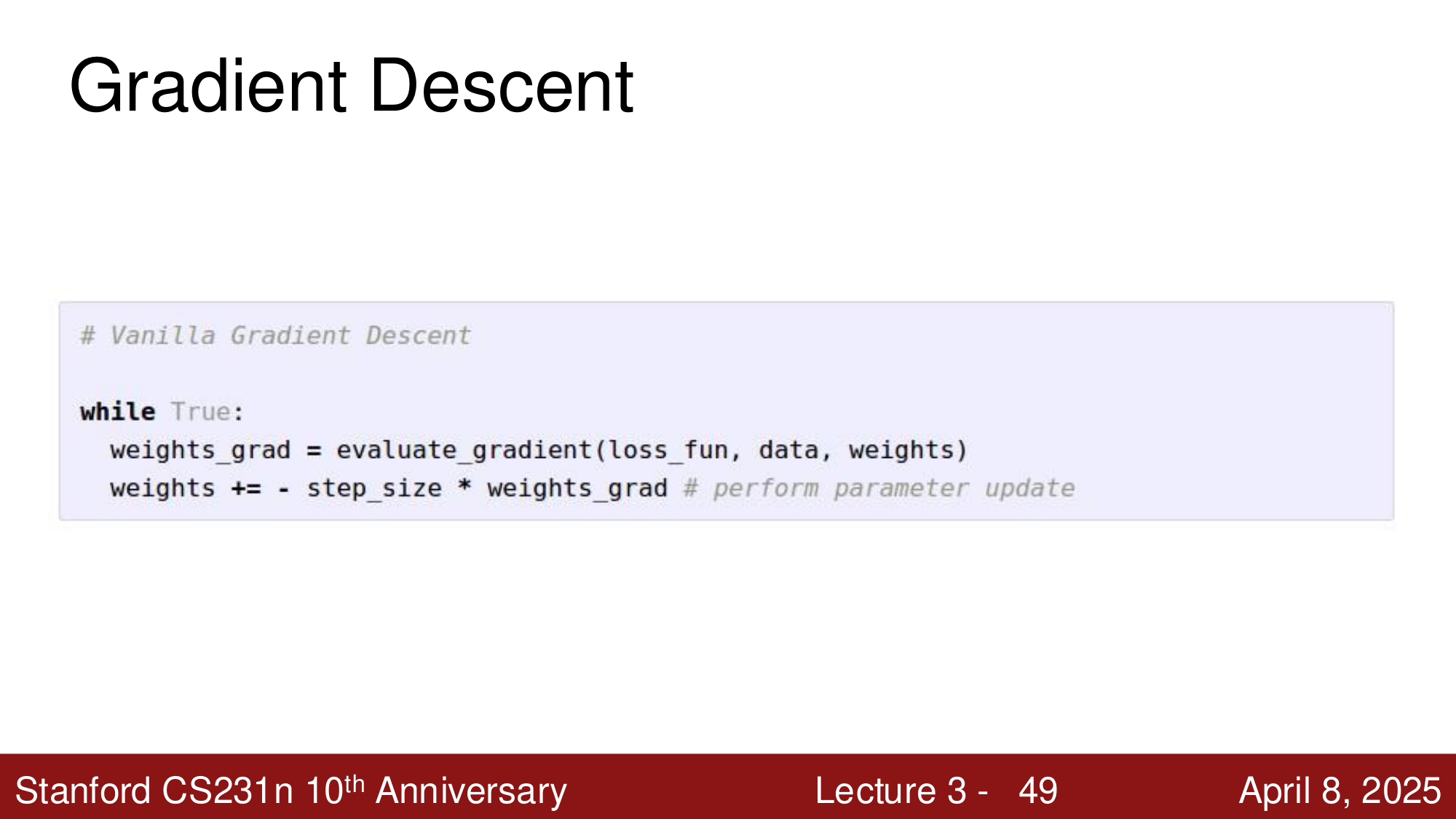
梯度下降 (Gradient Descent)¶
有了梯度,优化过程非常简单:反复沿负梯度方向更新权重。
其中 \(\alpha\) 是 学习率 (Learning Rate),控制每步走多远。
# Vanilla Gradient Descent
while True:
weights_grad = evaluate_gradient(loss_fun, data, weights)
weights += - step_size * weights_grad # perform parameter update
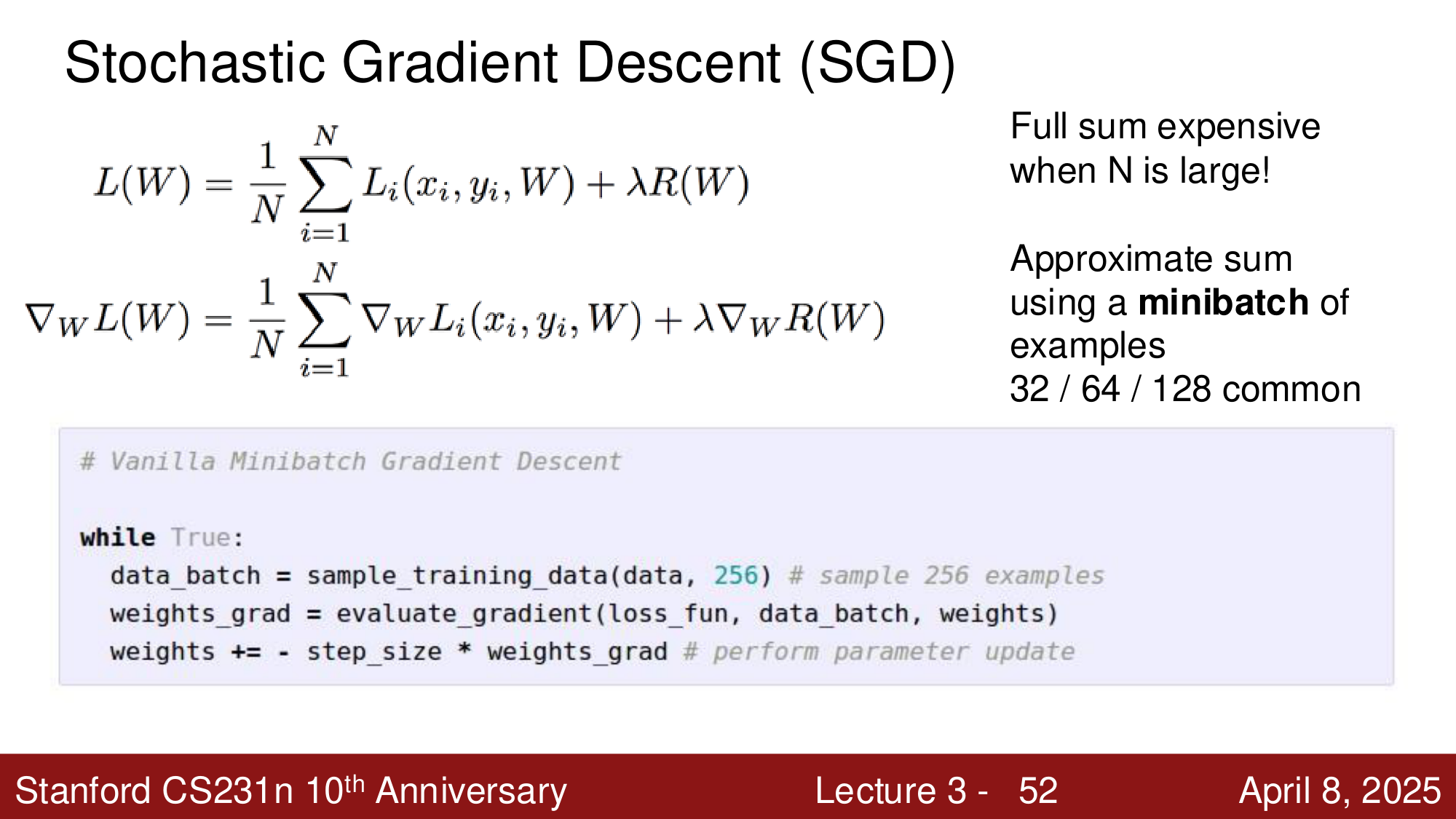
随机梯度下降 (Stochastic Gradient Descent, SGD)¶
当数据集很大时(如 \(N\) 为百万级别),计算全部样本的梯度非常昂贵。SGD 的核心思想是用一个 小批量 (minibatch) 的样本来近似全体梯度:
每次随机采样一小批样本(通常 32 / 64 / 128 个)来估计梯度。
# Vanilla Minibatch Gradient Descent
while True:
data_batch = sample_training_data(data, 256) # sample 256 examples
weights_grad = evaluate_gradient(loss_fun, data_batch, weights)
weights += - step_size * weights_grad # perform parameter update
SGD 的问题与改进¶
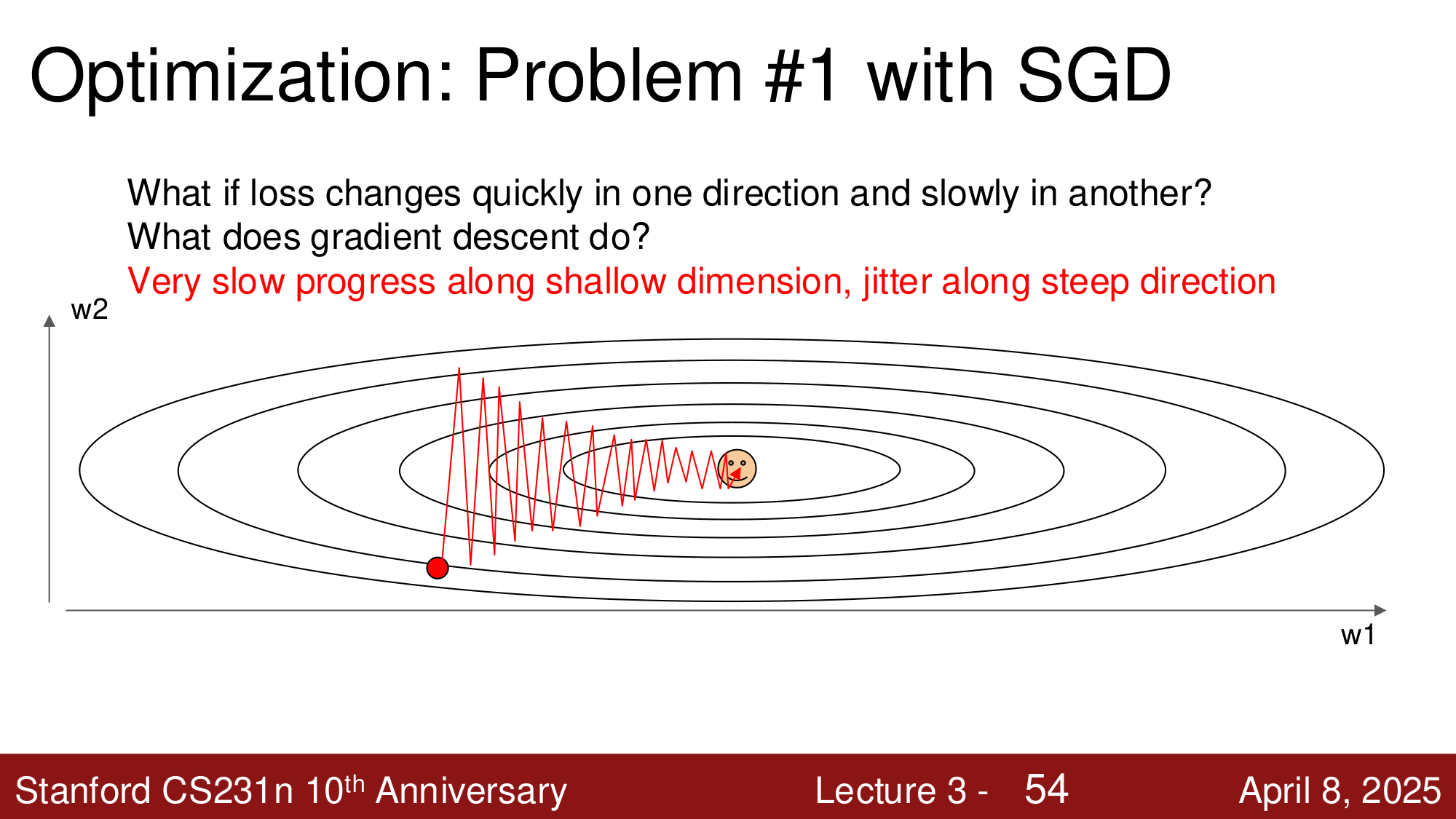
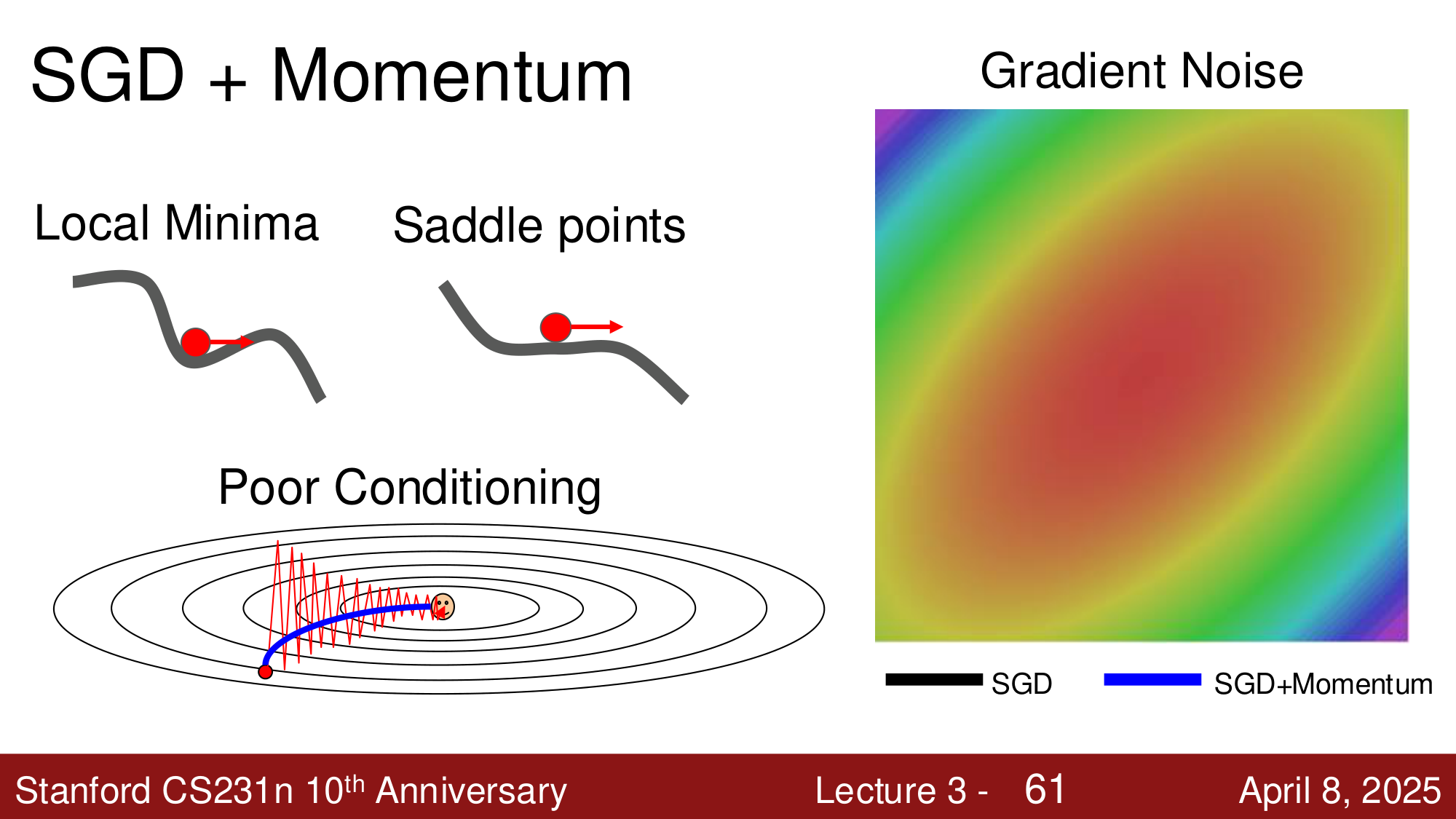
问题 #1:病态条件 (Poor Conditioning)¶
当损失函数在某些方向上变化很快、在另一些方向上变化很慢时(即 Hessian 矩阵的 条件数 很大),SGD 会在陡峭方向上来回振荡,而在平坦方向上进展缓慢。
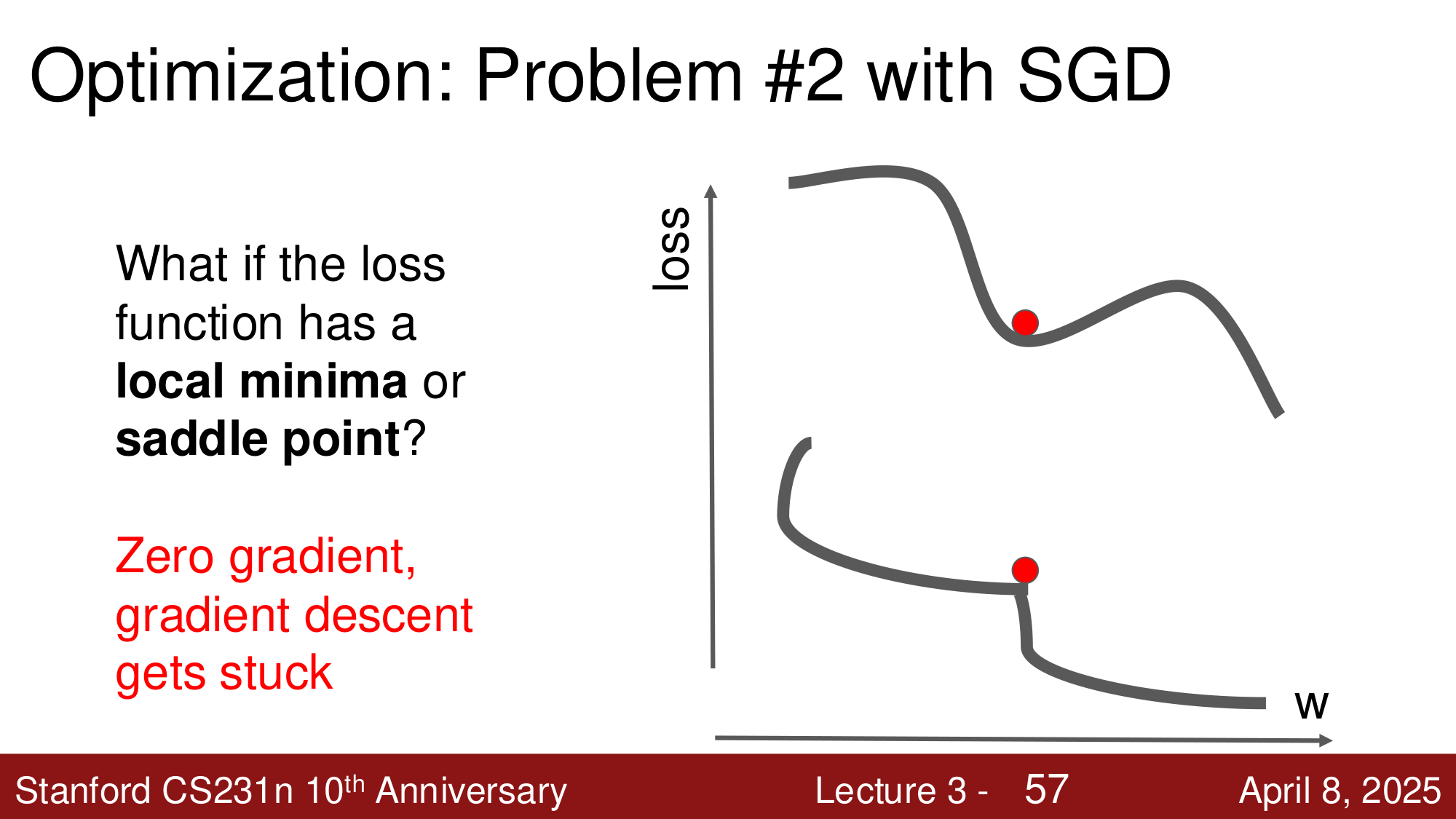
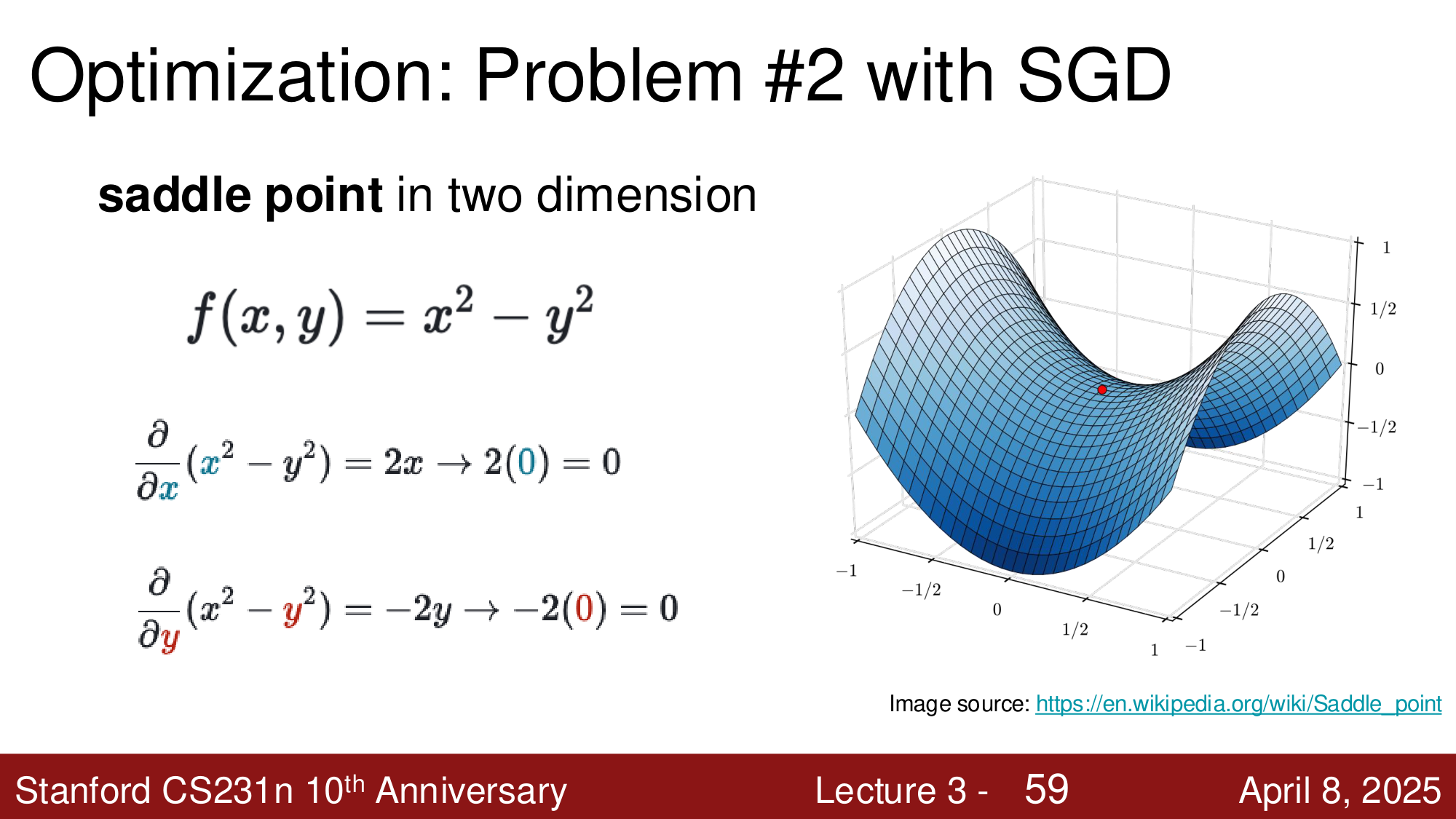
问题 #2:局部极小值和鞍点¶
- 局部极小值 (Local Minima):梯度为零,SGD 会卡住
- 鞍点 (Saddle Point):某些方向上是极小、某些方向上是极大,梯度也为零
在高维空间中,鞍点比局部极小值更常见。
鞍点的直观理解:考虑 \(f(x, y) = x^2 - y^2\),在原点处 \(\frac{\partial f}{\partial x} = 2x = 0\),\(\frac{\partial f}{\partial y} = -2y = 0\),梯度为零,但该点既不是极大值也不是极小值。
问题 #3:梯度噪声¶
由于 SGD 使用 minibatch 近似梯度,估计的梯度本身带有噪声,导致优化路径不平滑。
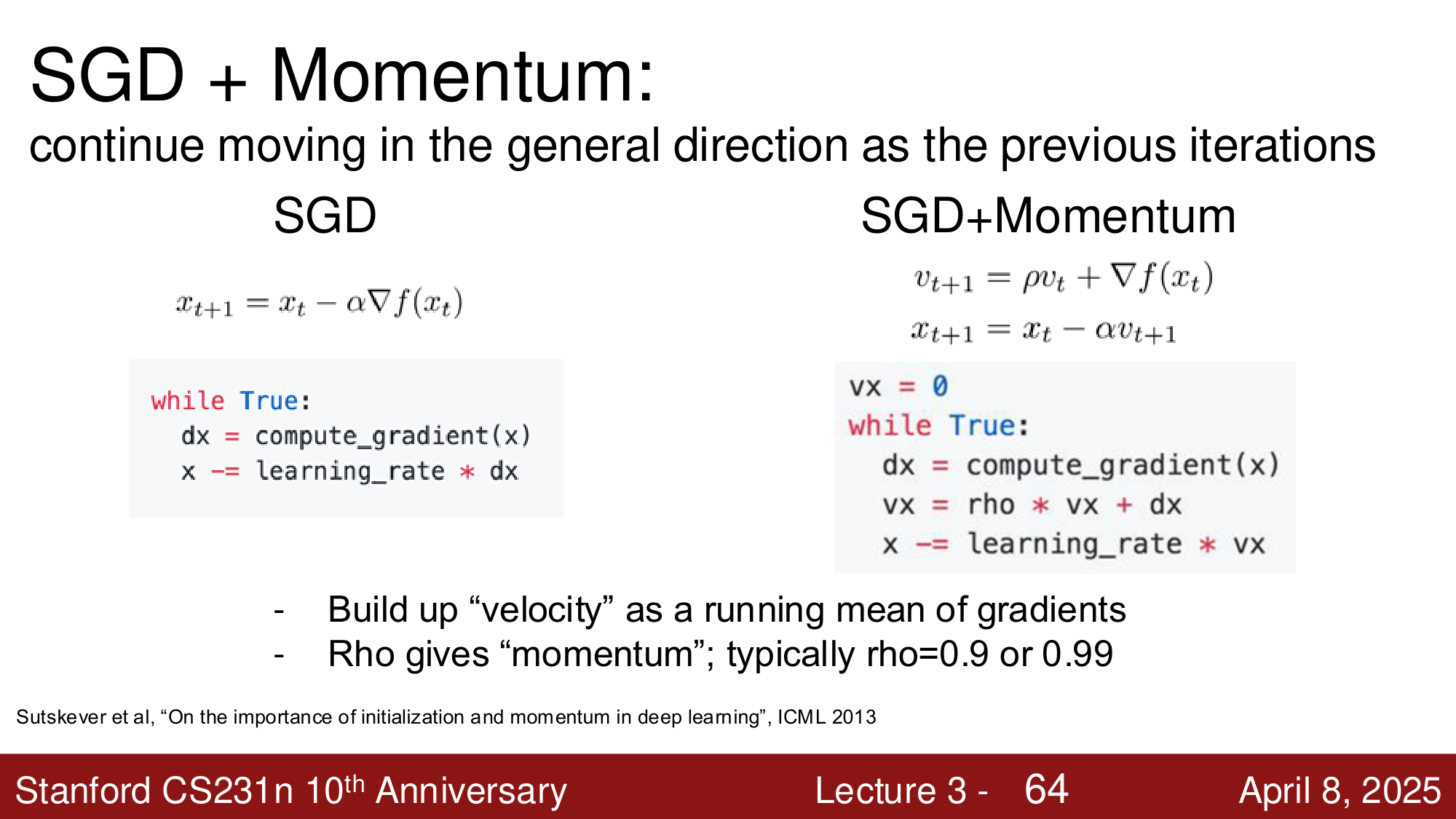
SGD + Momentum¶
动量法 (Momentum) 是解决上述三个问题的经典方法。核心思想是维护一个 速度 (velocity) 变量,作为梯度的指数移动平均:
- \(\rho\) 是 动量系数(通常 \(\rho = 0.9\) 或 \(0.99\)),表示"摩擦力"
- 速度 \(v\) 累积了历史梯度的信息
vx = 0
while True:
dx = compute_gradient(x)
vx = rho * vx + dx
x -= learning_rate * vx
为什么有效?
- 局部极小值 / 鞍点:即使梯度为零,速度仍然非零,可以继续前进
- 病态条件:在振荡方向上,正负梯度相互抵消;在一致方向上,速度不断累积
- 梯度噪声:速度对梯度进行了平均,减少了噪声的影响
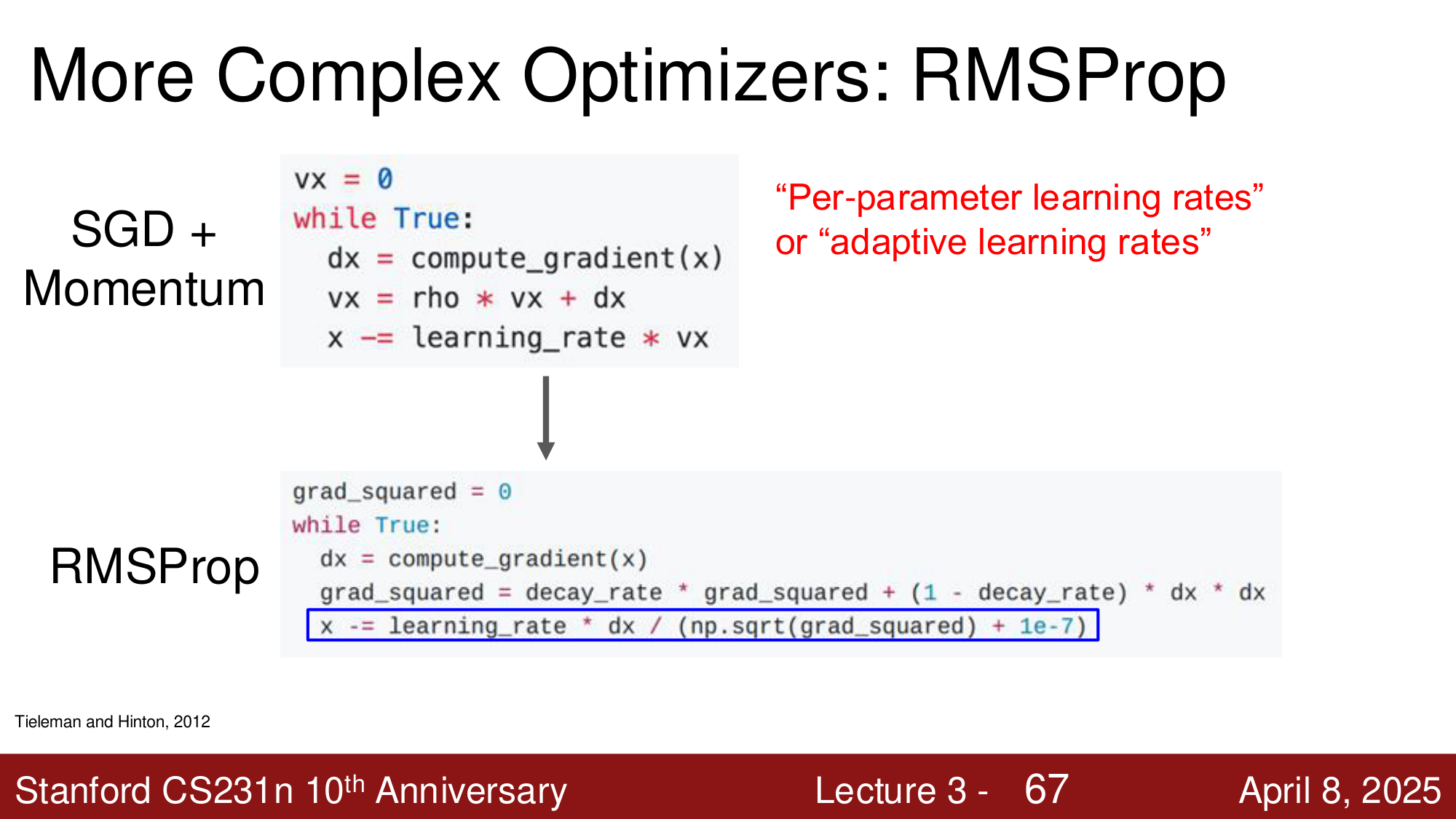
RMSProp¶
RMSProp 采用另一种思路来解决病态条件问题:为每个参数维护一个 自适应学习率 (adaptive learning rate)。
grad_squared = 0
while True:
dx = compute_gradient(x)
grad_squared = decay_rate * grad_squared + (1 - decay_rate) * dx * dx
x -= learning_rate * dx / (np.sqrt(grad_squared) + 1e-7)
- 对梯度的 平方 做指数移动平均
- 更新时除以 \(\sqrt{\text{grad\_squared}}\):梯度大的维度步长变小,梯度小的维度步长变大
效果:在陡峭方向上减速,在平坦方向上加速,从而更快地到达最优解。
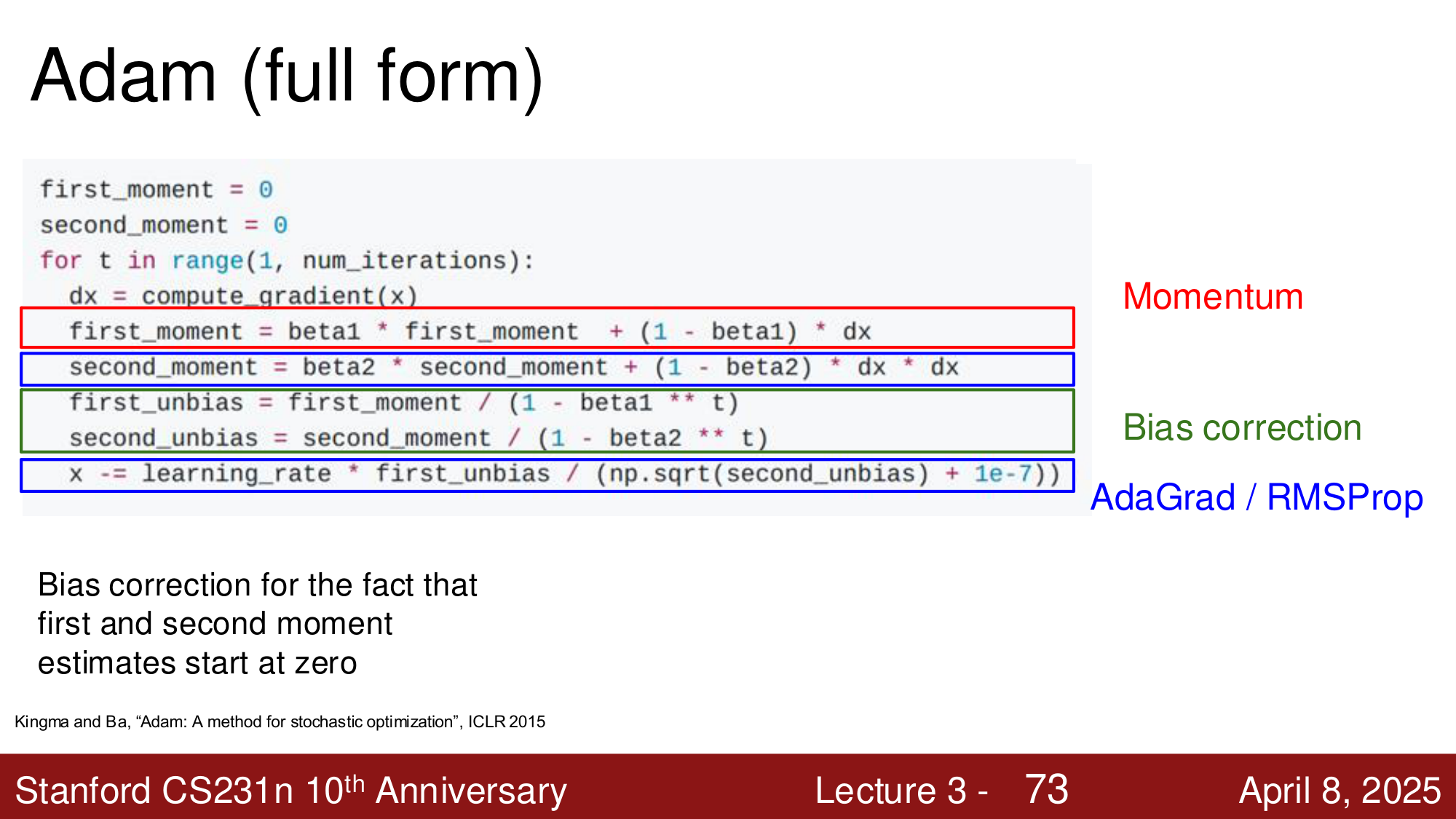
Adam¶
Adam (Adaptive Moment Estimation) 结合了 Momentum 和 RMSProp 的优点,是目前最常用的优化器之一。
Adam 维护两个指数移动平均:
- 一阶矩 (First Moment):梯度的均值(类似 Momentum)
- 二阶矩 (Second Moment):梯度平方的均值(类似 RMSProp)
并加入 偏差校正 (Bias Correction),修正初始阶段因矩估计从零开始导致的偏差(初始状态 second_moment = 0, beta2 接近 1, 导致 second_moment 初始阶段接近 0)。
first_moment = 0
second_moment = 0
for t in range(1, num_iterations):
dx = compute_gradient(x)
first_moment = beta1 * first_moment + (1 - beta1) * dx # Momentum
second_moment = beta2 * second_moment + (1 - beta2) * dx * dx # RMSProp
first_unbias = first_moment / (1 - beta1 ** t) # Bias correction
second_unbias = second_moment / (1 - beta2 ** t) # Bias correction
x -= learning_rate * first_unbias / (np.sqrt(second_unbias) + 1e-7)
推荐的默认参数:
- \(\beta_1 = 0.9\)
- \(\beta_2 = 0.999\)
- learning_rate = \(1 \times 10^{-3}\) 或 \(5 \times 10^{-4}\)
这是许多模型的良好起点。
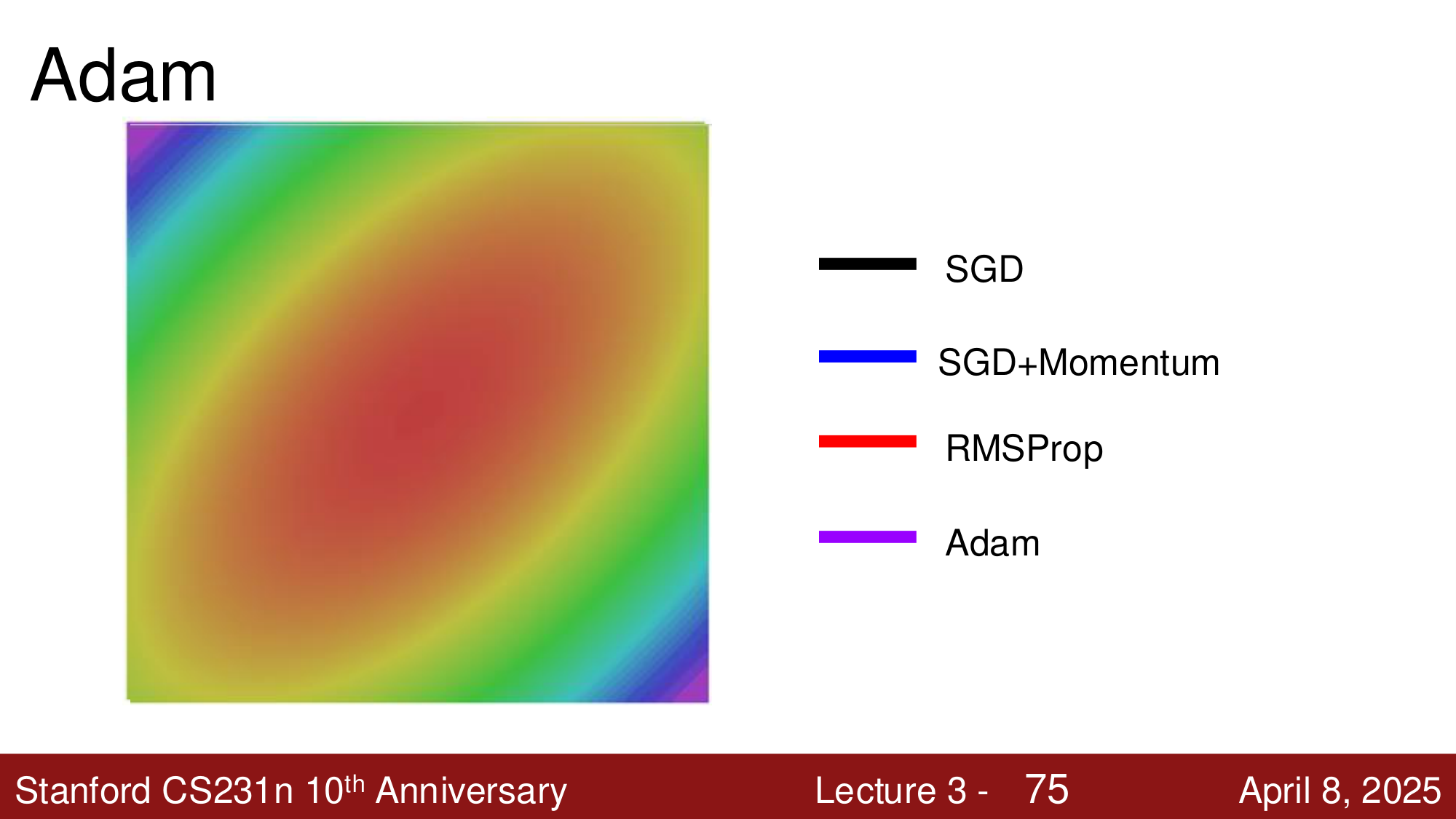
优化器对比可视化¶
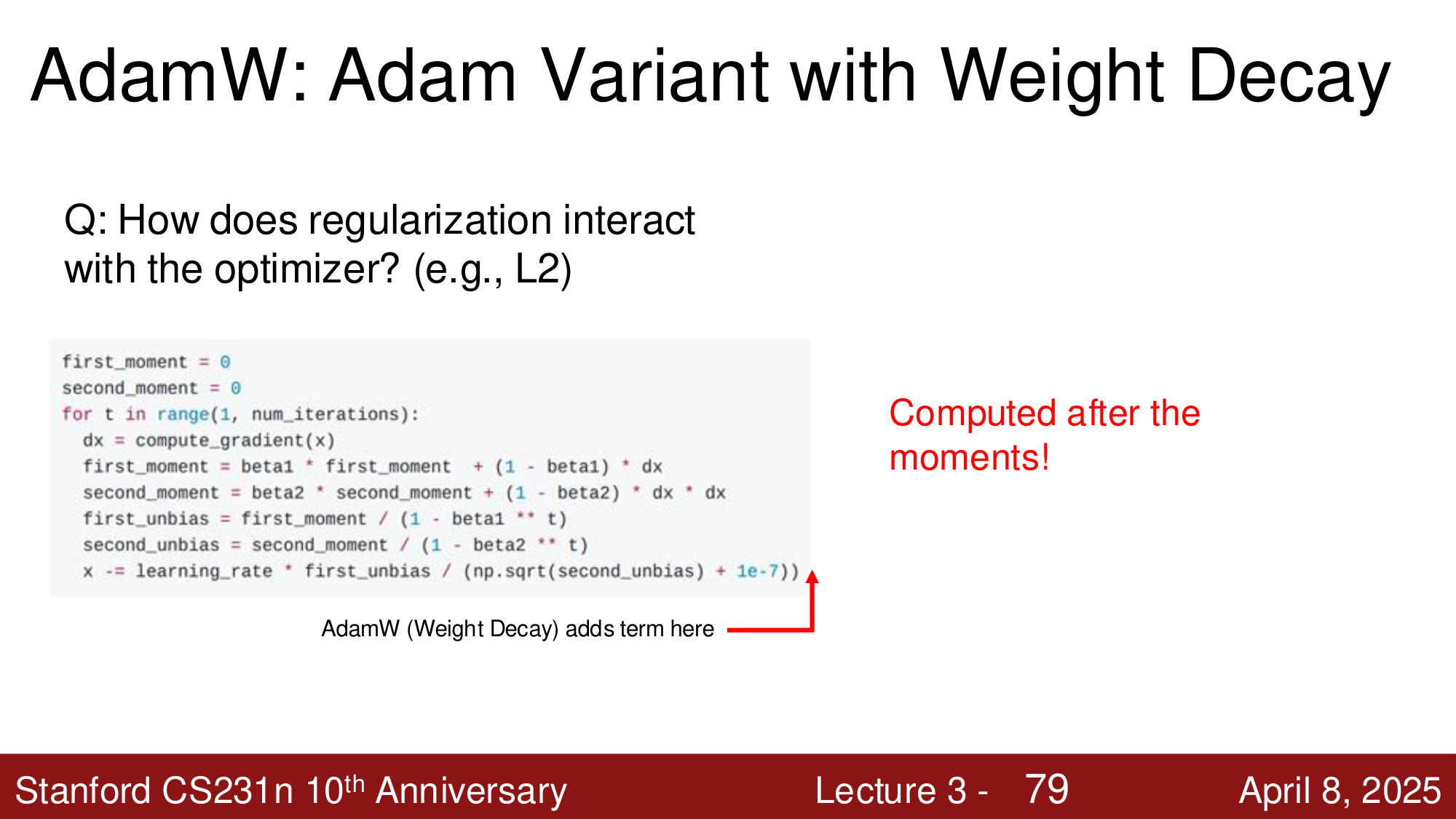
AdamW:带权重衰减的 Adam¶
正则化与优化器的交互方式很重要。标准 Adam 在 计算梯度时 就包含了 L2 正则化项,这意味着正则化梯度也会参与一阶矩和二阶矩的计算。
AdamW 将权重衰减(等价于 L2 正则化)从梯度计算中 分离 出来,直接在参数更新步骤中施加:
- 标准 Adam:在
compute_gradient(x)中计算 L2,用于动量计算 - AdamW:在最终更新
x -= ...后额外添加x -= wd * x
实验表明,AdamW 通常比标准 Adam + L2 正则化表现更好。
学习率调度 (Learning Rate Schedules)¶
学习率是所有优化器最重要的超参数。过大的学习率会导致损失爆炸,过小的学习率会收敛缓慢。
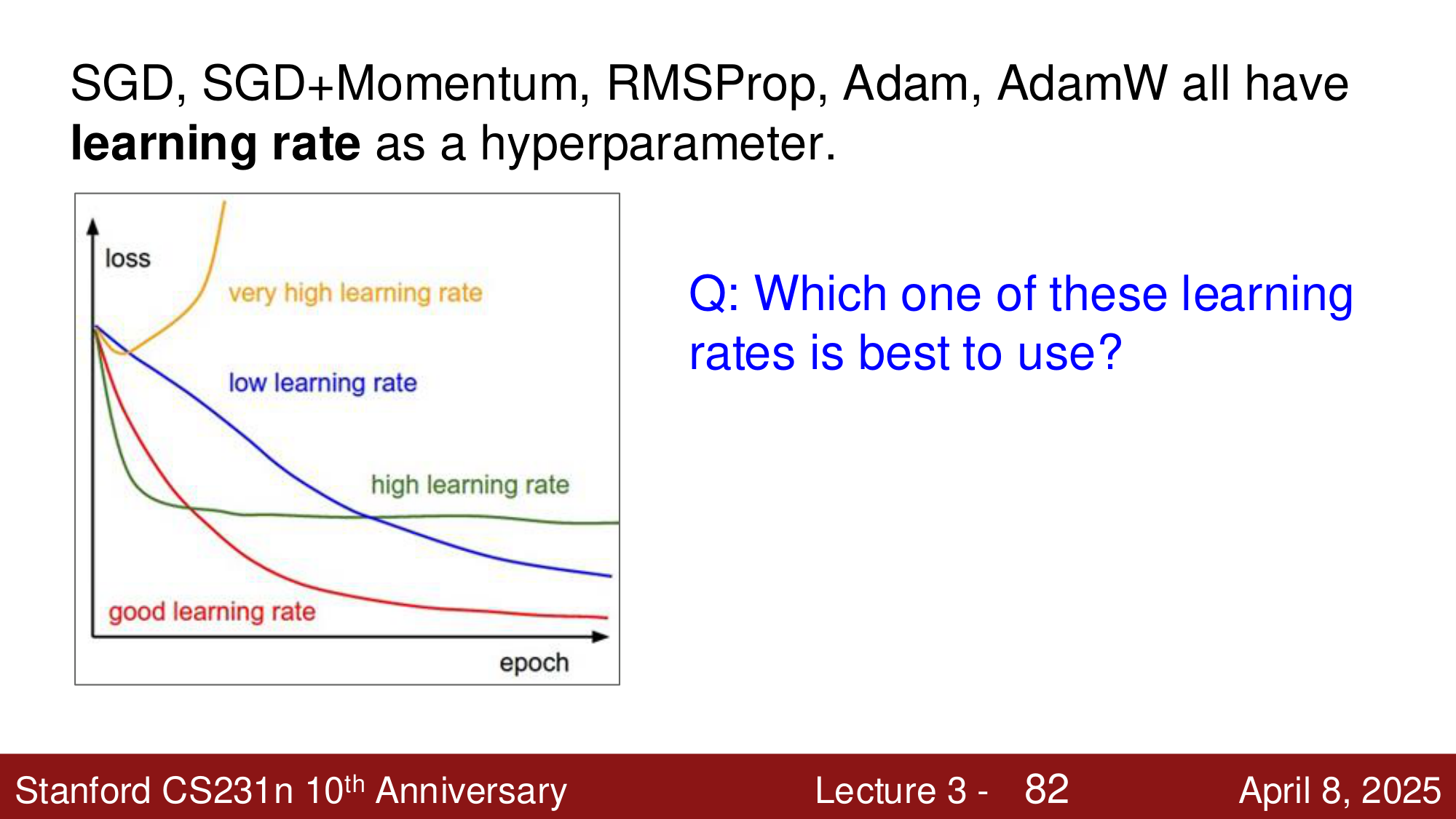
实践中,通常不使用固定学习率,而是让学习率随训练过程 逐渐减小。
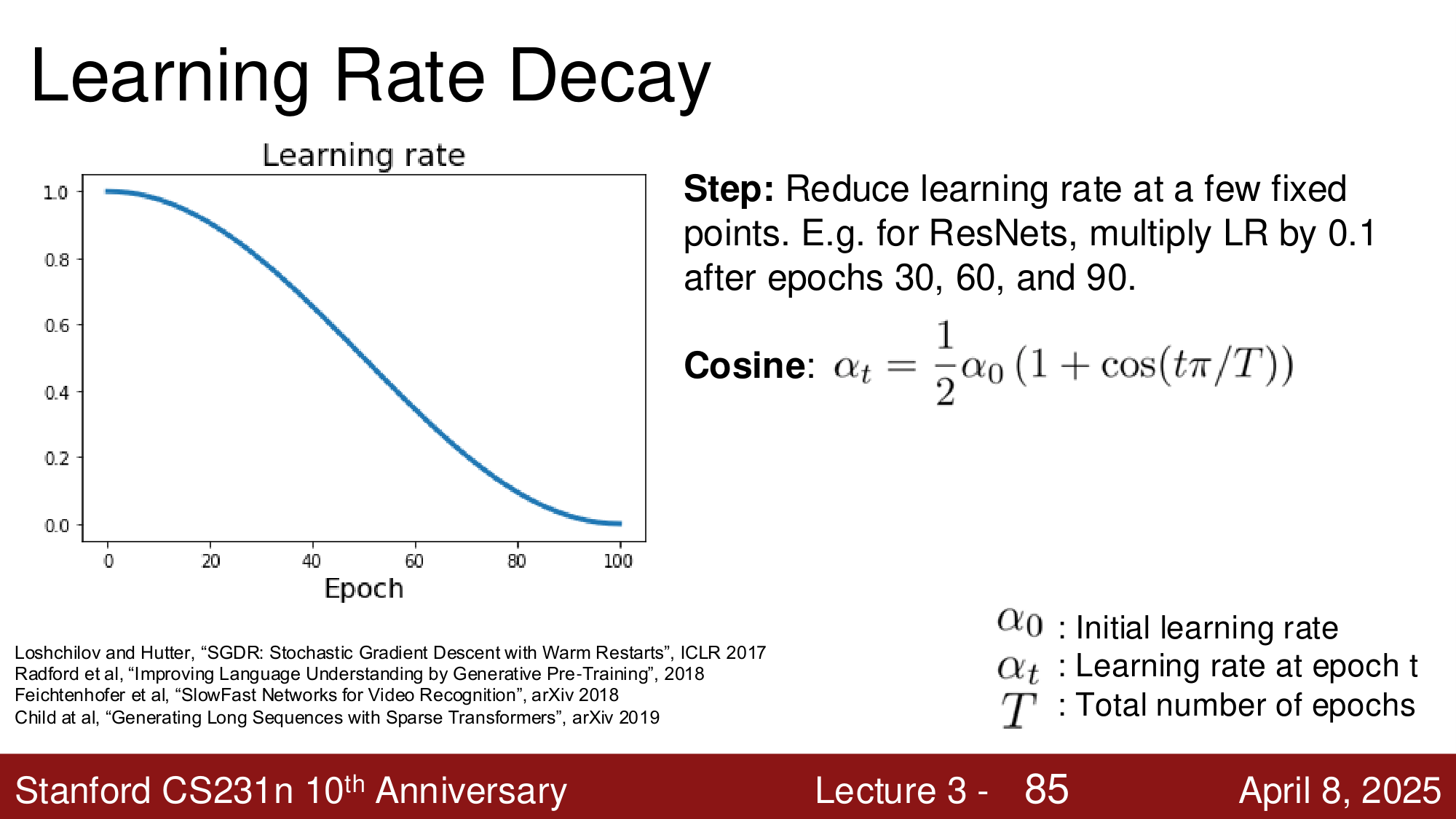
常见的学习率衰减策略¶
Step Decay:在固定的 epoch 节点降低学习率。例如 ResNet 在 epoch 30、60、90 时将学习率乘以 0.1。
Cosine Decay:
其中 \(\alpha_0\) 是初始学习率,\(t\) 是当前 epoch,\(T\) 是总 epoch 数。
Linear Decay:
Inverse Square Root Decay:
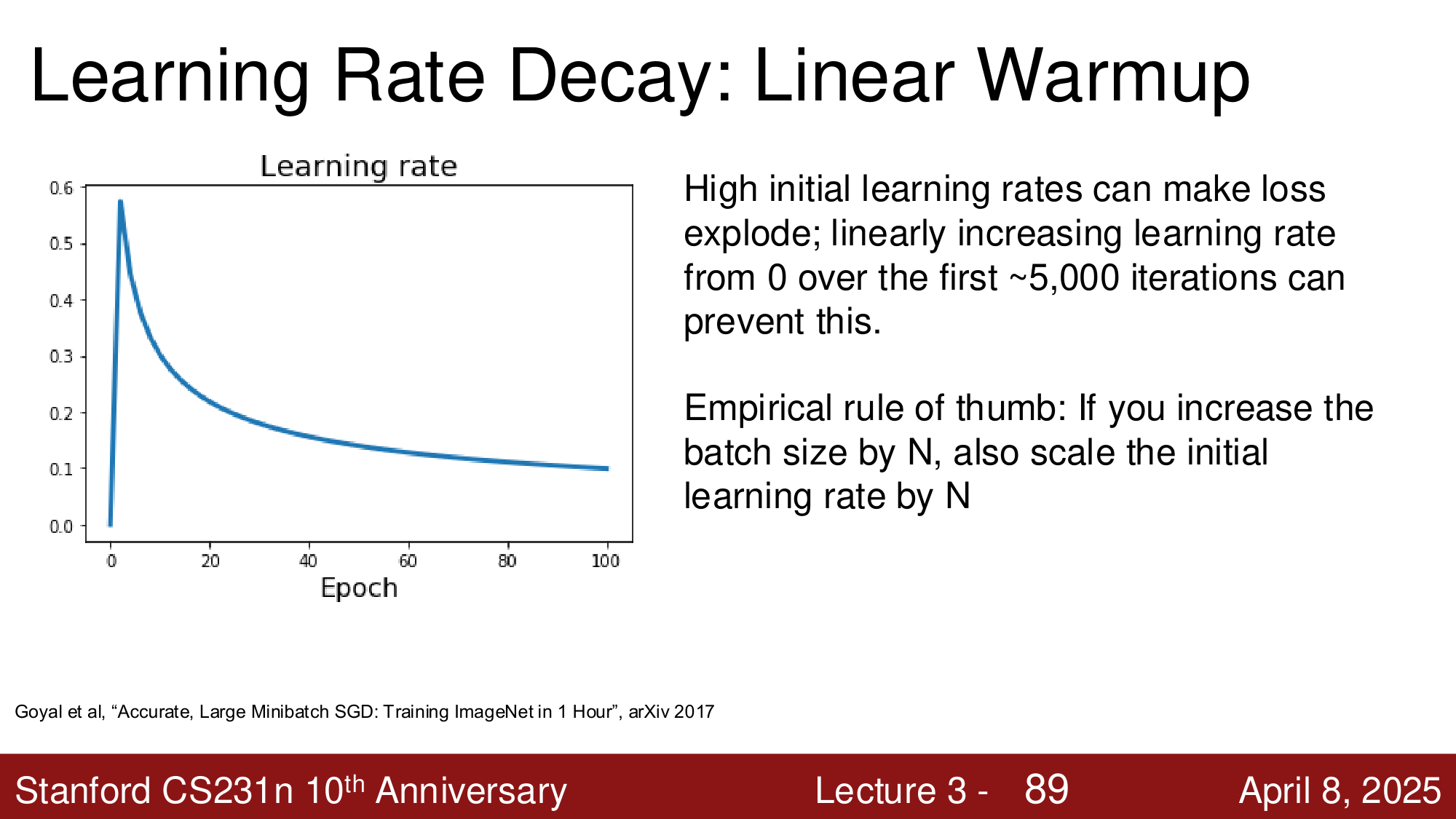
学习率预热 (Linear Warmup)¶
高初始学习率可能导致训练初期损失爆炸。线性预热 在训练前 \(\sim 5000\) 步内将学习率从 0 线性增加到目标值,之后再开始衰减。
经验法则:如果将 batch size 增大 \(N\) 倍,初始学习率也应相应增大 \(N\) 倍。
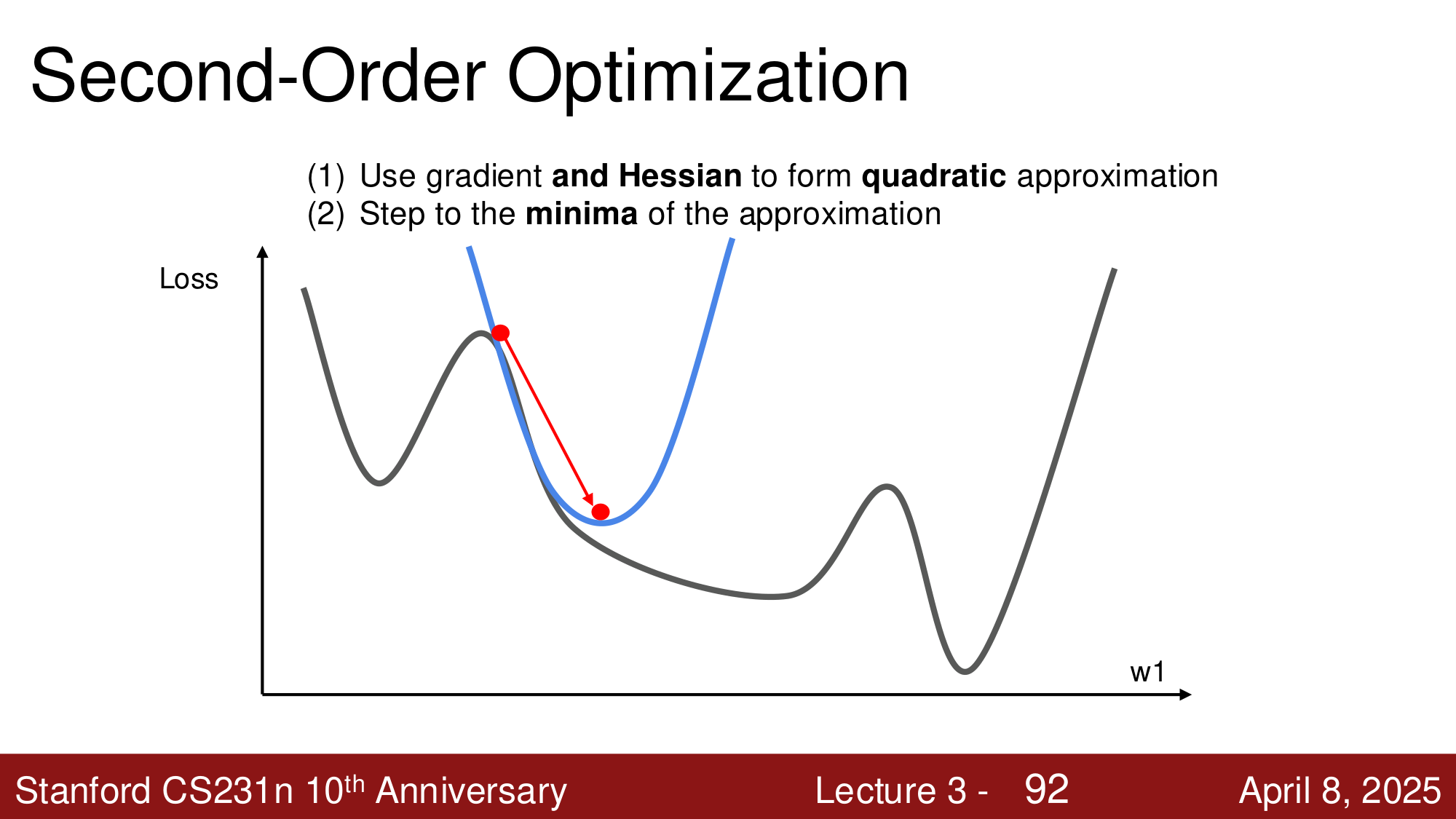
一阶优化 vs 二阶优化¶
我们讨论的所有优化器(SGD、Momentum、Adam 等)都是 一阶方法 (First-Order):只使用梯度(一阶导数)来构建线性近似,然后沿下降方向走一步。
二阶方法 (Second-Order) 使用梯度 和 Hessian 矩阵(二阶导数)来构建 二次近似,直接跳到近似函数的极小值点:
优点是不需要选择学习率,收敛更快。但 Hessian 矩阵有 \(O(N^2)\) 个元素,求逆需要 \(O(N^3)\) 的计算量——当 \(N\) 为几千万甚至上亿参数时,这是不可行的。
近似方法(如 L-BFGS)在全批量小模型中效果很好,但在大规模随机优化中效果不佳。
实践建议¶
- Adam(W) 是大多数情况下的良好默认选择,即使使用常数学习率也能工作
- SGD+Momentum 经过仔细调参后可能比 Adam 表现更好,但需要更多的学习率和调度调优
- 如果能承受全批量更新,可以尝试二阶方法
展望:神经网络¶
目前我们使用的是线性得分函数 \(f = Wx\),表达能力有限。下一讲将引入 神经网络,通过叠加多个线性层和非线性激活函数来构建更强大的模型。
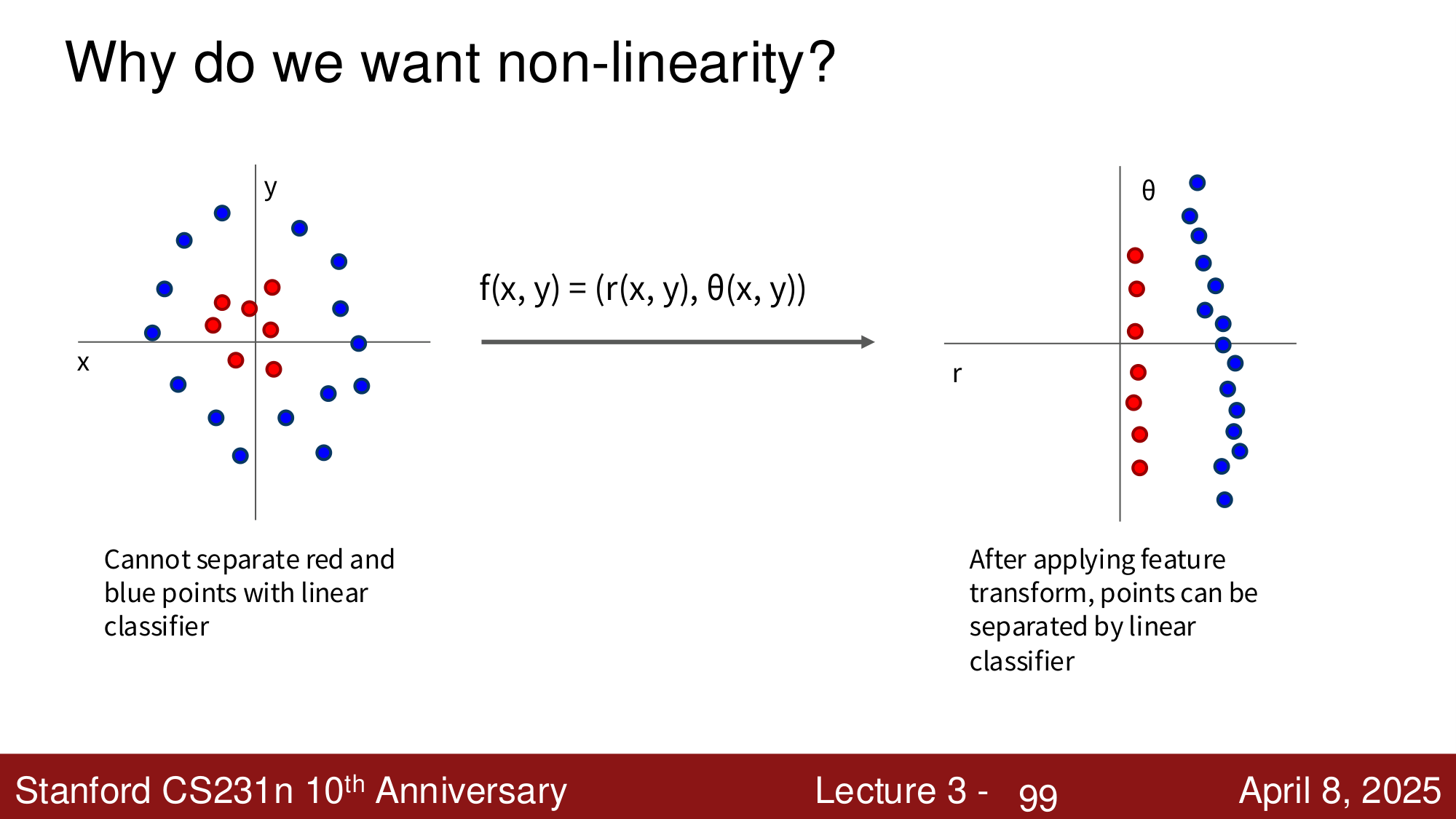
为什么需要非线性?¶
线性分类器无法解决某些分布问题(如同心圆分布)。但如果先对输入做一个 非线性特征变换(例如从笛卡尔坐标 \((x, y)\) 变换到极坐标 \((r, \theta)\)),原本不可分的数据就变得线性可分了。
两层神经网络¶
其中 \(x \in \mathbb{R}^D\),\(W_1 \in \mathbb{R}^{H \times D}\),\(W_2 \in \mathbb{R}^{C \times H}\)。
\(\max(0, \cdot)\) 是 ReLU 激活函数,提供了关键的非线性。没有这个非线性,两个线性变换的组合仍然是线性的(\(W_2 W_1 x\) 等价于一个新的矩阵乘法),不会增加表达能力。
这种网络也称为 全连接网络 (Fully-Connected Network) 或 多层感知机 (MLP)。
下节预告¶
- 神经网络详解
- 反向传播 (Backpropagation):如何高效计算神经网络中的梯度